Object Detection#
About#
This feature lets you generate object detectors using existing cameras in AutonomySim, similar to deep neural network (DNN) object detectors. Using the API, you can control which object to detect by name and the radial distance from the camera. One can control the settings for each camera, image type, and vehicle combination separately.
API#
-
Set the mesh name to detect in wildcard format:
simAddDetectionFilterMeshName(camera_name, image_type, mesh_name, vehicle_name = '') -
Clear all mesh names previously added:
simClearDetectionMeshNames(camera_name, image_type, vehicle_name = '') -
Set the detection radius in centimeters:
simSetDetectionFilterRadius(camera_name, image_type, radius_cm, vehicle_name = '') -
Get the detections:
simGetDetections(camera_name, image_type, vehicle_name = '')
The return value of simGetDetections is a DetectionInfo array:
DetectionInfo
name = ''
geo_point = GeoPoint()
box2D = Box2D()
box3D = Box3D()
relative_pose = Pose()
Usage#
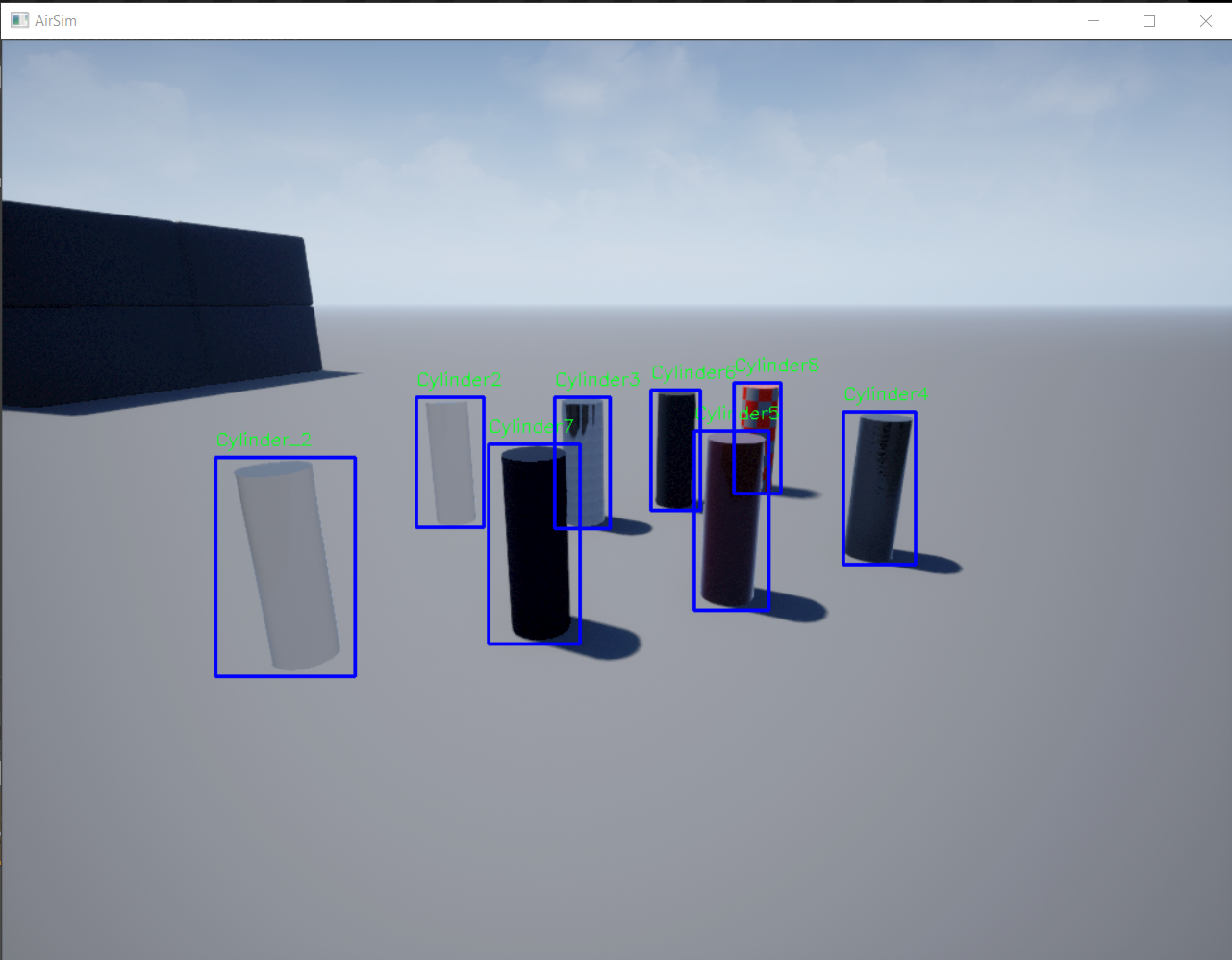
The Python script detection.py shows how to set detection parameters and shows the result in OpenCV capture.
A minimal example using API with Blocks environment to detect Cylinder objects is below:
camera_name = "0"
image_type = AutonomySim.ImageType.Scene
client = AutonomySim.MultirotorClient()
client.confirmConnection()
client.simSetDetectionFilterRadius(camera_name, image_type, 80 * 100) # in [cm]
client.simAddDetectionFilterMeshName(camera_name, image_type, "Cylinder_*")
client.simGetDetections(camera_name, image_type)
detections = client.simClearDetectionMeshNames(camera_name, image_type)
Output result:
Cylinder: <DetectionInfo> {
'name': 'Cylinder9_2',
'geo_point': <GeoPoint> {
'altitude': 16.979999542236328,
'latitude': 32.28772183970703,
'longitude': 34.864785008379876
},
'box2D': <Box2D> {
'max': <Vector2r> {
'x_val': 617.025634765625,
'y_val': 583.5487060546875
},
'min': <Vector2r> {
'x_val': 485.74359130859375,
'y_val': 438.33465576171875
}
},
'box3D': <Box3D> {
'max': <Vector3r> {
'x_val': 4.900000095367432,
'y_val': 0.7999999523162842,
'z_val': 0.5199999809265137
},
'min': <Vector3r> {
'x_val': 3.8999998569488525,
'y_val': -0.19999998807907104,
'z_val': 1.5199999809265137
}
},
'relative_pose': <Pose> {
'orientation': <Quaternionr> {
'w_val': 0.9929741621017456,
'x_val': 0.0038591264747083187,
'y_val': -0.11333247274160385,
'z_val': 0.03381215035915375
},
'position': <Vector3r> {
'x_val': 4.400000095367432,
'y_val': 0.29999998211860657,
'z_val': 1.0199999809265137
}
}
}